Robodog que se Curva para Trás Enfrenta Espaços Confinados com mais Velocidade
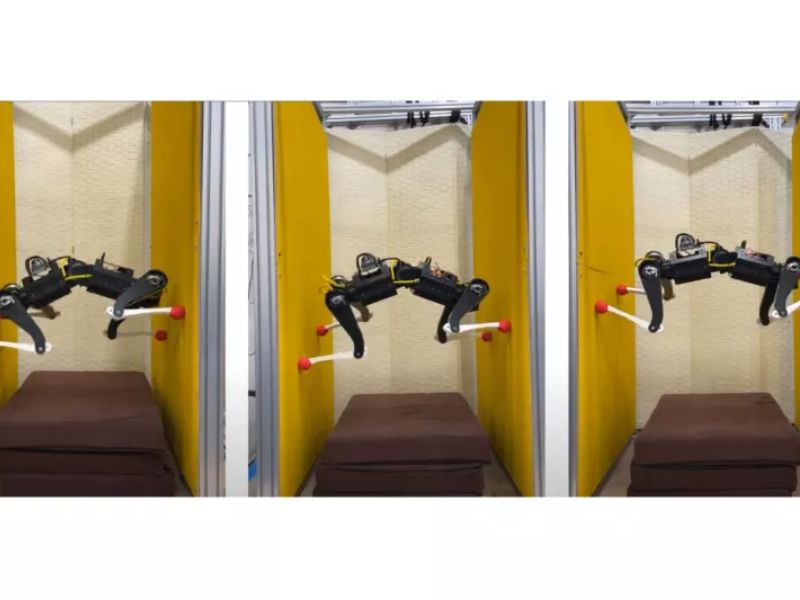
Crédito:The KLEIYN robodog can ascend chimney-like walls at up to 170 mm per second
JSK
A maioria dos robôs de quatro patas que vemos hoje apresenta corpos rígidos e de peça única, um design que funciona bem para muitas de suas tarefas. No entanto, para espaços apertados ou verticais, uma estrutura flexível oferece vantagens importantes — fazendo com que o cão-robô KLEIYN se destaque.
A Vantagem de uma Coluna Vertebral Flexível
Embora robôs como ANYmal, Lynx e Go2 apresentem agilidade impressionante e sejam frequentemente usados para tarefas de transporte, suas colunas vertebrais rígidas limitam a mobilidade em ambientes apertados. Em contraste, um robô com coluna vertebral flexível pode adaptar seu formato para escalar espaços estreitos, como o interior de uma chaminé.

Crédito:The KLEIYN robodog can tackle various terrains and climb in the wild too JSK
Em vez de usar garras ou sucção para escalar superfícies verticais, os pesquisadores equiparam o KLEIYN com potentes articulações nas pernas que pressionam firmemente contra paredes opostas lisas, criando atrito suficiente para mantê-lo suspenso. Essa abordagem estratégica elimina a necessidade de mecanismos complexos de preensão.
Mecânica Avançada das Pernas para Mobilidade Versátil
Cada uma das pernas do KLEIYN possui três graus de liberdade e uma articulação de passo adicional no ombro e no joelho traseiro. Os atuadores fornecem 25 Nm de torque com uma relação de transmissão de 1:10. Ao contrário de robôs similares, o design de panturrilha oposta do KLEIYN melhora a aderência vertical sem afetar a marcha normal.
Um motor de 40 Nm, acoplado a uma redução de marcha de 1:9, aciona o mecanismo da cintura, que fornece um único grau de liberdade. Duas seções simétricas de alumínio abrigam a bateria e os sistemas — a parte frontal com um LiDAR e uma IMU, e a parte traseira para equilíbrio.
Treinamento Virtual para Desempenho no Mundo Real
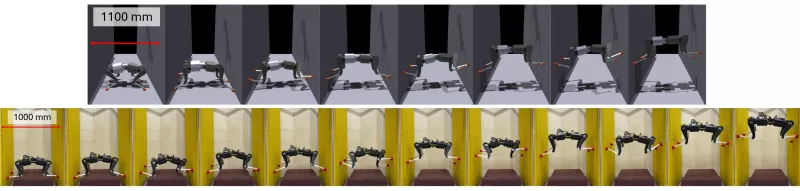
Crédito:Learning to climb in a simulated environment (top) and applying that to real-world tests (bottom) JSK
No cenário de 800 mm, o KLEIYN atingiu velocidades de escalada de até 170 mm por segundo — 50 vezes mais rápido que o hexápode SiLVIA da UCLA, que escala a 3 mm/s. Testes adicionais demonstraram sua capacidade de caminhar em escadas e terrenos irregulares com facilidade.
Uma Ferramenta Promissora para Inspeção e Resgate
Com 13 kg e 760 mm de comprimento, o tamanho compacto do KLEIYN é adequado para inspeções industriais e tarefas de busca e salvamento. Sua combinação de design mecânico e treinamento virtual o torna um destaque no campo em evolução da robótica.
Leia o artigo original em: New Atlas
Leia mais:Relatório Aponta que 75% dos Adolescentes Americanos já Interagiram com IA.









