Robô Humanoide Avançado Realiza o Moonwalk
Crédito:KAIST humanoid lower body platform running. Credit: The Korea Advan
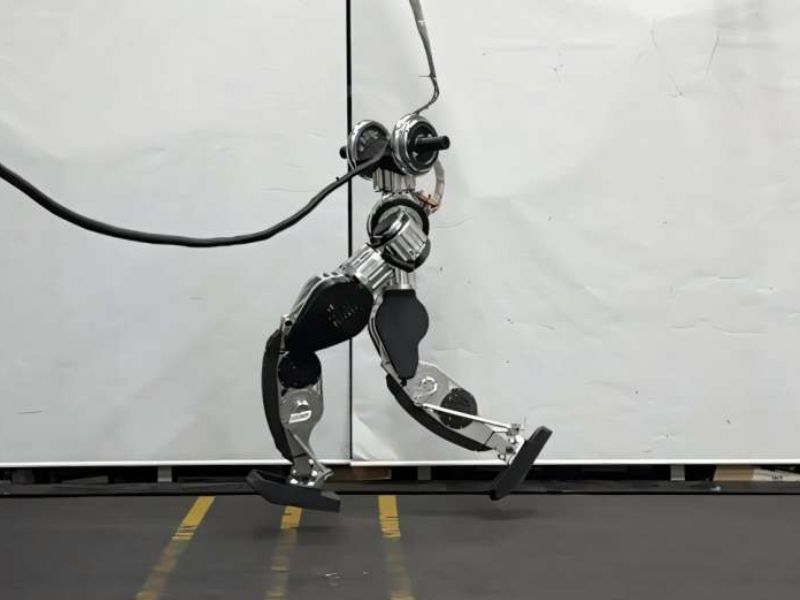
O robô humanoide da KAIST demonstra mobilidade de alto nível, atingindo 12 km/h com excelente estabilidade e realizando movimentos complexos como o duckwalk e o moonwalk, marcando-o como uma plataforma de próxima geração para uso industrial.
Desenvolvimento de uma Plataforma para a Parte Inferior do Corpo Semelhante à Humana para Humanoides de Próxima Geração
A equipe do Professor Park Hae-won no HuboLab da KAIST criou a plataforma da parte inferior de um robô humanoide de próxima geração. Projetado para ambientes voltados para humanos, o robô tem 165 cm de altura e pesa 75 kg, assemelhando-se bastante às proporções humanas.
O avanço é significativo, pois a equipe projetou e construiu todos os principais componentes de hardware, alcançando total independência no desenvolvimento do hardware.
A equipe construiu um algoritmo de aprendizado por reforço, treinando a IA em simulação e aplicando-o com sucesso ao uso no mundo real, superando a lacuna entre Sim e Real. Isso também garantiu autonomia no desenvolvimento do algoritmo.
O humanoide atualmente corre a 3,25 m/s (12 km/h) e sobe degraus com mais de 30 cm, com metas de atingir 4,0 m/s (14 km/h), subir escadas e subir degraus com mais de 40 cm.
O grupo do Professor Hae-Won Park está colaborando com equipes do KAIST e do MIT para desenvolver um humanoide totalmente integrado com hardware para a parte superior do corpo e IA avançada.
Equipando Robôs com Habilidades Versáteis para Tarefas Industriais do Mundo Real
A equipe está desenvolvendo tecnologia para robôs que possam lidar com levantamento de peso, operar máquinas e executar tarefas coordenadas, como caminhar enquanto manipulam, com o objetivo de equipá-los com habilidades versáteis para uso industrial.

Crédito:Single-leg hopping robot. Credit: The Korea Advanced Institute of Scie
A equipe também construiu um robô “saltitante” com uma perna só, capaz de se equilibrar, saltar repetidamente e executar uma cambalhota de 360 graus.
Avanço no Aprendizado por Reforço sem um Modelo de Referência Biológica
O que torna essa conquista especialmente notável é que o aprendizado por imitação não era possível, pois não existia um modelo de referência biológica. Os pesquisadores construíram um controlador de IA com aprendizado por reforço que otimizou o equilíbrio e reduziu o impacto do pouso, alcançando um desempenho excelente.
O professor Park Hae-won destacou que o marco mostra independência em hardware e software, com planos de criar um humanoide industrial para futura colaboração com humanos.

Crédito:Key components of the directly developed robot: (a) reducer, (b) motor
O candidato a doutorado JongHun Choe apresentará as descobertas sobre hardware no Humanoids 2025 em 1º de outubro.
Doutorandos Dongyun Kang, Gijeong Kim e JongHun Choe apresentarão seus trabalhos sobre algoritmos de IA como coautores no CoRL 2025 em 29 de setembro.
Os artigos de apresentação foram disponibilizados no servidor de pré-impressão arXiv.
Leia o artigo original em: Techxplore
Leia mais: Robô Autônomo de Mergulho Limpa Lixo do Fundo do Mar









