Robô Manipula Objetos Grandes Como um Humano Após uma Aula
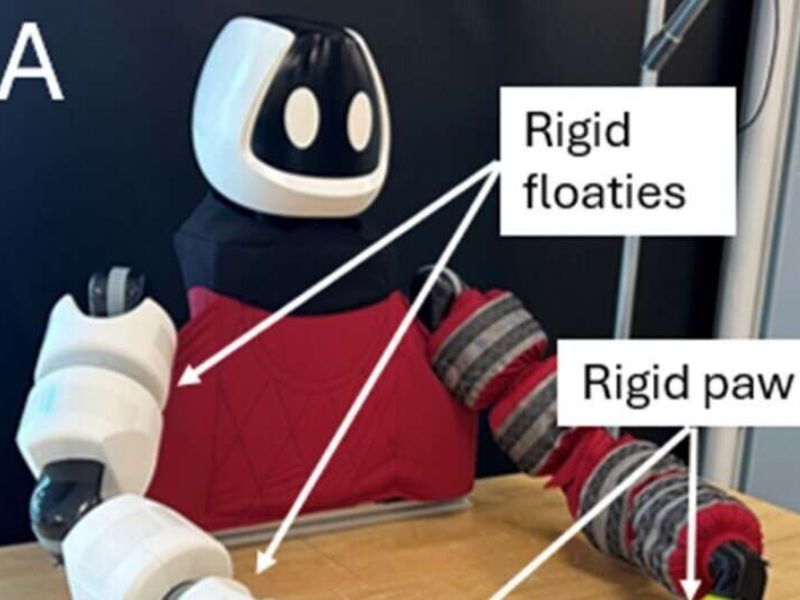
Crédito:Pictures showing the (A) rigid air-filled chamber stand-ins and paws used for compliance experiments. (B) close-up picture of the rigid air-filled chamber stand-ins showing the cutouts added to avoid reducing the range of motion due to self-collisions compared to the soft air-filled chambers. Image Credits: Science Robotics (2025). DOI: 10.1126/scirobotics.ads6790
Apesar de suas capacidades avançadas — desde explorar planetas distantes até realizar cirurgias complexas —, os robôs continuam a ter dificuldades com tarefas humanas simples. Um dos maiores obstáculos é a destreza: a habilidade de agarrar, segurar e manipular objetos. Mas isso pode estar mudando. Pesquisadores do Instituto de Pesquisa Toyota, em Massachusetts, treinaram um robô para usar todo o corpo para manusear objetos grandes, imitando o trabalho dos humanos.
Os humanos usam uma combinação de habilidades motoras finas — como movimentos precisos das mãos — e habilidades motoras grossas, envolvendo braços, pernas e tronco, para pegar e manusear objetos. Os robôs, no entanto, têm dificuldades com esses movimentos maiores, que envolvem todo o corpo, como levantar e estabilizar uma caixa grande, porque exigem ajustes contínuos e complexos para manter o controle e evitar que o objeto caia.
Um Robô Humanoide Demonstra Manuseio Avançado de Objetos
Em um estudo publicado na Science Robotics, pesquisadores apresentaram um robô humanoide com a parte superior do corpo chamado Punyo, que conseguia levantar uma grande jarra de água sobre o ombro e segurar uma caixa grande. Punyo utilizou o feedback de sua pele macia e sensível à pressão e de sensores articulares para coordenar seus movimentos.
O sucesso do robô deveu-se em grande parte à maciez de seu corpo (conhecida como complacência passiva) e à flexibilidade programada em suas articulações (complacência ativa). Comparado a uma versão rígida, esse design complacente resultou em um desempenho significativamente melhor. “A incorporação de qualquer forma de complacência — passiva, ativa ou ambas — melhorou os resultados, aumentando as taxas de sucesso em uma média de 206% em relação a um modelo não complacente“, observaram os pesquisadores.
Outra vantagem fundamental foi a capacidade do robô de aprender rapidamente. Utilizando uma técnica chamada aprendizado por reforço guiado por exemplo, os pesquisadores treinaram o Punyo com apenas uma demonstração virtual. A partir daí, ele praticou de forma independente até dominar a tarefa. Como a equipe explicou, “uma única demonstração teleoperada em simulação é suficiente para treinar políticas eficazes para movimentos complexos e com alto contato físico“.
Robôs Mais Capazes
Essa tecnologia representa um grande avanço no desenvolvimento de robôs mais úteis no dia a dia. Por exemplo, eles poderiam manusear itens volumosos com segurança e eficiência, como móveis em casa ou pacotes pesados em armazéns. Eles também poderiam auxiliar em ambientes de assistência, auxiliando pessoas com problemas de mobilidade. É importante ressaltar que esses robôs não exigiriam programação detalhada — eles poderiam aprender habilidades semelhantes às humanas com apenas um exemplo.
Leia o artigo original em: Tech Xplore
Leia mais: Uma Lua de Sangue Global de 82 Minutos Chegará Este Mês









