Johns Hopkins Está Ensinando um Robô a Fazer Cirurgia de Vesícula Biliar em um Simulador Realista
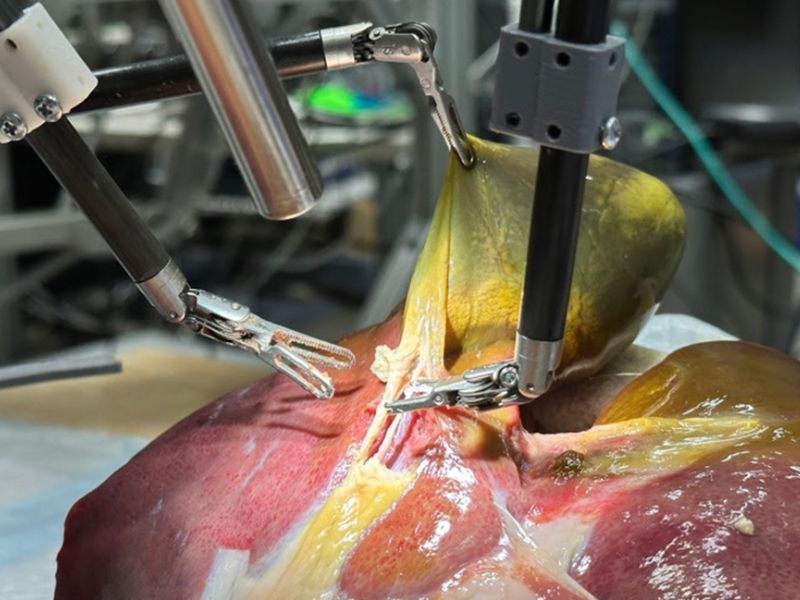
Créditos da imagem: A Hierarquia do Robô Cirúrgico Transformador realizando uma cirurgia na vesícula biliar. | Fonte: Juo-Tung Chen, Universidade Johns Hopkins
A Universidade Johns Hopkins anunciou hoje que um robô, treinado por meio de vídeos cirúrgicos, realizou com sucesso grande parte da remoção da vesícula biliar em um modelo de paciente realista, sem intervenção humana. Durante o procedimento, o robô respondeu a comandos de voz da equipe médica, de forma semelhante à forma como um cirurgião em treinamento aprende com um mentor.
Segundo os pesquisadores, o robô demonstrou o nível de habilidade de um cirurgião humano experiente, adaptando-se até mesmo a situações inesperadas comuns em emergências da vida real. O projeto, financiado pelo governo federal, representa um grande avanço na robótica cirúrgica, combinando precisão mecânica com adaptabilidade semelhante à humana, afirmou a universidade.
“Isso nos leva além de robôs que seguem instruções, para robôs que realmente compreendem procedimentos cirúrgicos”, disse o especialista em robótica médica Axel Krieger. “É um avanço fundamental para sistemas cirúrgicos autônomos capazes de operar nas condições imprevisíveis do atendimento no mundo real.”
Sistema Johns Hopkins se Ajusta a Mudanças Anatômicas em Tempo Real
Em 2022, o Smart Tissue Autonomous Robot (STAR) de Axel Krieger concluiu sua primeira cirurgia totalmente autônoma em um animal vivo um procedimento laparoscópico em um porco. No entanto, os pesquisadores operavam essa versão inicial sob condições rigorosamente controladas, utilizando tecido pré-marcado e seguindo um roteiro cirúrgico fixo. Krieger comparou isso a ensinar um robô a dirigir um carro por uma rota pré-planejada.
O novo sistema, no entanto, é muito mais avançado. “É como ensinar um robô a lidar com qualquer estrada, sob quaisquer condições, e responder de forma inteligente a tudo o que encontrar”, disse Krieger.
Chamado de Surgical Robot Transformer-Hierarchy (SRT-H), o modelo mais recente pode realmente realizar cirurgias. Ele se ajusta à anatomia de cada paciente em tempo real, toma decisões rápidas e se corrige quando algo sai fora do planejado.
Usando a mesma arquitetura de aprendizado de máquina do ChatGPT, o SRT-H também é interativo ele entende instruções faladas como “pegue a cabeça da vesícula biliar” e correções como “mova o braço esquerdo um pouco para a esquerda”, aprendendo com cada interação.
“Isso representa um avanço importante rumo ao uso real de robôs cirúrgicos autônomos”, disse Ji Woong “Brian” Kim. “Nossas descobertas mostram que a autonomia cirúrgica com IA, antes vista como distante, agora está ao nosso alcance.”
SRT-H Expande Funções Cirúrgicas Fundamentais
No ano passado, a equipe de Krieger treinou seu robô para realizar, em segundos, três tarefas cirúrgicas: manuseio de agulhas, elevação de tecido e sutura. Essa conquista rendeu à Johns Hopkins o Prêmio de Inovação em Robótica RBR50 de 2025.
Em contraste, a remoção da vesícula biliar é muito mais complexa, envolvendo uma sequência de 17 etapas ao longo de vários minutos. O robô precisava identificar os principais ductos e artérias, agarrá-los com precisão, aplicar clipes nos locais corretos e fazer cortes cuidadosos com tesouras cirúrgicas.
Para aprender o procedimento, o sistema SRT-H analisou vídeos de cirurgiões universitários realizando remoções de vesícula biliar em cadáveres de porcos, complementados por legendas descrevendo cada etapa.
Após o treinamento com esses vídeos, o robô executou o procedimento com 100% de precisão, de acordo com a Johns Hopkins. Apesar de levar mais tempo do que um cirurgião humano, o sistema apresentou um desempenho equivalente ao de um profissional qualificado.
“Essa abordagem reflete como os residentes cirúrgicos frequentemente dominam partes de uma operação em ritmos diferentes”, disse Jeff Jopling, coautor e cirurgião da Johns Hopkins. “Isso demonstra o potencial do desenvolvimento de robôs cirúrgicos autônomos de forma modular e passo a passo semelhante.”
Robô Demonstra Adaptabilidade em Cenários Cirúrgicos Imprevisíveis
O robô operou com sucesso em condições anatômicas variadas e lidou com mudanças inesperadas, como mudanças em sua posição inicial e a introdução de corantes semelhantes ao sangue, que alteraram a aparência da vesícula biliar e dos tecidos próximos.
“Para mim, isso prova que a execução totalmente autônoma de procedimentos cirúrgicos complexos é possível”, disse Krieger. “Isso demonstra que o aprendizado por imitação pode ser usado para automatizar operações complexas com confiabilidade notável.”
A equipe de pesquisa pretende expandir o treinamento do sistema para incluir tipos adicionais de cirurgias e, em última análise, permitir que ele realize procedimentos inteiros de forma autônoma.
Leia o Artigo Original The Robot Report
Leia mais Figure Revela um Robô Humanoide Redesenhado com o Novo e Elegante Modelo F.02









