Crédito:Techxplore
Ensinar novas habilidades a robôs antigamente exigia experiência em programação, mas uma nova onda de robôs poderá em breve aprender com praticamente qualquer pessoa. Engenheiros desenvolvem robôs que “aprendem por demonstração“, sendo guiados por joystick, movimentação física ou observação da tarefa feita por humanos.
Normalmente, robôs que aprendem por demonstração dependem de apenas um desses modos de treinamento. Engenheiros do MIT criaram uma interface 3 em 1 que permite aos robôs aprender por qualquer um dos três métodos de demonstração.
Uma ferramenta flexível e prática para ensinar qualquer tarefa a robôs
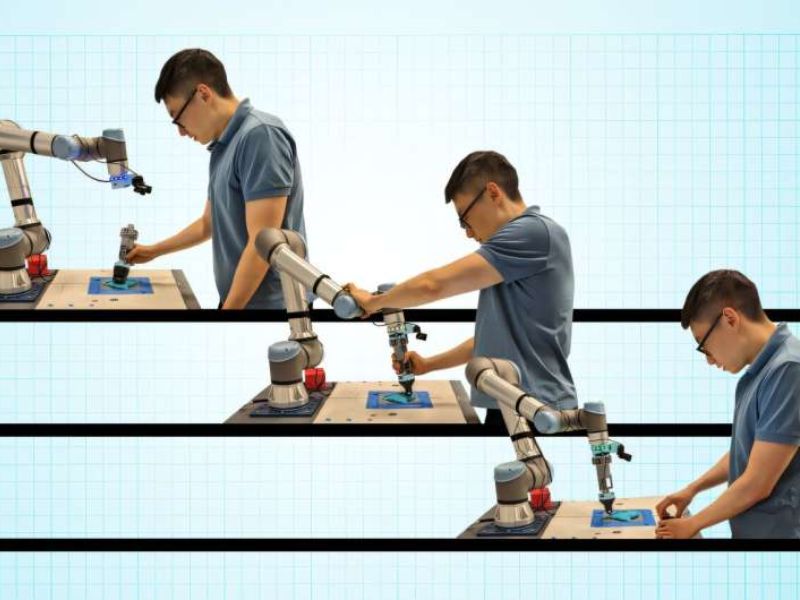
Esta ferramenta inovadora é um dispositivo portátil, equipado com sensores, que se acopla a braços robóticos colaborativos padrão. Ela permite que os usuários ensinem um robô controlando-o remotamente, guiando-o manualmente ou demonstrando a tarefa eles mesmos — qualquer que seja a abordagem mais conveniente ou eficaz para a situação.
A equipe do MIT avaliou seu novo dispositivo, apelidado de “interface de demonstração versátil“, usando um braço robótico colaborativo padrão. Eles recrutaram voluntários com experiência em manufatura para usar a interface e realizar duas tarefas práticas comumente realizadas em ambientes industriais.Pesquisadores afirmam que a nova interface oferece maior flexibilidade de treinamento, permitindo que mais pessoas ensinem robôs. Ela também pode permitir que os robôs adquiram um conjunto mais diversificado de habilidades. Por exemplo, uma pessoa pode treinar remotamente um robô para manusear materiais perigosos, outra pode guiá-lo manualmente na tarefa de empacotamento e uma terceira pode demonstrar o desenho de um logotipo para o robô aprender.
“Nosso objetivo é construir companheiros de equipe robóticos inteligentes e habilidosos que trabalhem perfeitamente com humanos em tarefas complexas”, afirma Mike Hagenow, pesquisador de pós-doutorado no MIT. “Ferramentas de treinamento flexíveis como essas podem ser igualmente úteis em residências ou ambientes de cuidado — não apenas em fábricas. Afinal, quem não gostaria de um robô que dobra roupas e entende nuances?”
Hagenow apresentará um artigo sobre a nova interface na conferência IEEE Intelligent Robots and Systems (IROS) em outubro. O artigo também está disponível no servidor de pré-impressão arXiv.
Esforço Colaborativo de Especialistas de Departamentos do MIT
A pesquisa foi coautorada por Dimosthenis Kontogiorgos, Yanwei Wang e Julie Shah, do MIT.
No MIT, o grupo de Julie Shah desenvolve robôs que colaboram com humanos em ambientes como trabalho, hospitais e casas, focando em sistemas que aprendem tarefas em tempo real com os usuários.
Por exemplo, um operário poderia ajustar os movimentos do robô de forma rápida e intuitiva, sem interromper a produção ou precisar reprogramar o software.
O projeto usa a abordagem crescente de “aprendizagem por demonstração” (LfD), que treina robôs por meio de interações mais naturais com humanos.
Três Abordagens Principais para o Treinamento de Robôs Identificadas
Ao revisarem as pesquisas existentes sobre LfD, Shah e o pós-doutorado Mike Hagenow identificaram três abordagens principais de treinamento: teleoperação, ensino cinestésico e demonstração natural. Cada método possui pontos fortes que podem ser adequados a diferentes usuários ou tarefas.
Isso os levou a questionar se uma única ferramenta poderia combinar as três abordagens, facilitando o ensino de uma gama mais ampla de tarefas a robôs por um número maior de pessoas.
“Se conseguirmos integrar essas três maneiras de interagir com um robô, poderemos abrir novas possibilidades tanto para pessoas quanto para aplicações”, explica Hagenow.
Com esse objetivo em mente, a equipe desenvolveu uma nova ferramenta chamada Interface de Demonstração Versátil (VDI). Esse dispositivo portátil é montado em um braço robótico colaborativo padrão e inclui uma câmera, marcadores de rastreamento e sensores de força para monitorar o movimento e a pressão aplicada.
Uma vez conectado ao robô, o VDI permite o controle remoto total do robô, com a câmera de bordo capturando seus movimentos como dados de treinamento que o robô pode usar posteriormente para aprender a tarefa de forma independente. Alternativamente, uma pessoa pode guiar fisicamente o robô por uma tarefa com o VDI instalado.Design Destacável Permite que Robôs Aprendam Observando Demonstrações Humanas
O VDI também pode ser removido do robô e usado de forma independente por uma pessoa para executar a tarefa manualmente. Conforme o usuário executa a tarefa, a câmera registra o movimento e, uma vez recolocado o VDI, o robô pode replicar as ações com base no que observou.
Para avaliar a facilidade de uso do dispositivo, os pesquisadores levaram o VDI e um braço robótico a um centro de inovação local, onde profissionais de manufatura exploram tecnologias que podem aprimorar as operações da fábrica.
Eles conduziram um experimento no qual voluntários usaram o VDI em todos os três modos de treinamento para ensinar ao robô duas tarefas padrão de manufatura: prensagem e moldagem. Na tarefa de prensagem, os participantes treinaram o robô para pressionar pinos em furos — um procedimento de fixação comum em fábricas.
Na tarefa de moldagem, um voluntário treinou o robô para prensar e enrolar um material macio, semelhante a uma massa, uniformemente em torno de uma haste central — um processo semelhante a certas técnicas de termomoldagem.
Testando os Três Modos de Treinamento em Tarefas Reais de Fabricação
Cada participante executou as tarefas de prensagem e moldagem usando os três métodos: joystick, orientação física e demonstração direta com o VDI. Durante o método final, o robô registrou os dados de força e movimento da interface para fins de aprendizado.Os pesquisadores observaram que os voluntários, em geral, preferiam o método de demonstração natural à teleoperação e à orientação cinestésica. No entanto, os profissionais de manufatura também identificaram casos de uso em que cada abordagem poderia ser particularmente eficaz. Por exemplo, a teleoperação pode ser ideal para treinar um robô a manusear materiais perigosos ou tóxicos.
O ensino cinestésico pode ser vantajoso ao guiar robôs em tarefas que envolvam itens grandes ou pesados que exijam reposicionamento preciso. A demonstração natural, por outro lado, é especialmente útil para demonstrar tarefas que exigem precisão e manuseio delicado.
“Imaginamos que essa interface de demonstração seja usada em ambientes dinâmicos de manufatura, onde um único robô pode auxiliar em uma variedade de tarefas — cada uma melhor ensinada por meio de um método diferente”, afirma Hagenow. Ele planeja refinar a interface com base no feedback do usuário e usar a versão atualizada em futuros experimentos de treinamento de robôs.
“Este estudo mostra que podemos tornar os robôs colaborativos mais adaptáveis, projetando interfaces que expandem a forma como os usuários finais interagem com eles durante o processo de ensino”, acrescenta. 








