Robô Voador se Transforma em Terra e Viaja Sobre Rodas

Créditos da imagem: Uma exposição múltipla do robô ATMO se preparando para pousar. Ioannis Mandralis/Engenharia de Comunicações
Imagine um robô que pode alternar perfeitamente entre voar como um drone e dirigir como um rover com rodas. Tal dispositivo poderia ter aplicações práticas significativas, desde que funcione de forma confiável em ambientes reais. É exatamente para isso que o robô ATMO foi construído, transformando-se no ar antes de pousar.
Origens e Desenvolvimento no Caltech
O ATMO, abreviação de Aerially Transforming Morphobot (Morfobot de Transformação Aérea), foi desenvolvido por engenheiros do Instituto de Tecnologia da Califórnia (Caltech). Este robô inovador baseia-se nos fundamentos de uma criação anterior do Caltech, conhecida como M4 (Morfobot de Mobilidade Multimodal).
Em seu modo de voo, o M4 opera como um quadricóptero tradicional, usando quatro hélices com cobertura posicionadas horizontalmente. Ao pousar, essas hélices se dobram para baixo, transformando-se em rodas motorizadas, com as coberturas funcionando como aros com rodas para tração no solo.

Créditos da imagem: O robô M4, pronto para rodar Caltech
Apesar de sua engenhosidade, esse projeto tinha uma falha crítica: obstáculos como pedras ou vegetação irregular poderiam impedir que as hélices se dobrassem após o pouso. O ATMO enfrenta esse desafio iniciando sua transformação ainda no ar — levando suas rodas/hélices a uma posição quase final antes do pouso.
Um Mecanismo de Dobramento Sofisticado
No projeto do ATMO, cada hélice permanece impulsionada por seu próprio motor durante o voo, mas um único motor central gerencia um mecanismo articulado que dobra as hélices para dentro ou para fora. Embora isso pareça simples, o processo é dinamicamente complexo.

Créditos da imagem: O ATMO pesa 5,5 kg (12 lb) e mede 16 cm de altura por 65 cm de largura (6,3 x 25,6 pol) em sua configuração aérea (foto aqui, no solo). Ioannis Mandralis/Engenharia de Comunicações
À medida que as hélices mudam de posição e o fluxo de ar descendente começa a interagir com o solo que se aproxima, o comportamento de voo do ATMO muda significativamente. Para manter o controle durante essa transição, os pesquisadores desenvolveram um algoritmo adaptativo que recalibra constantemente o empuxo de cada hélice em tempo real.
Transição Perfeita para o Deslocamento em Solo
Graças a esse sistema, o ATMO pode executar “pousos dinâmicos” estáveis com as rodas já posicionadas. Uma vez no solo, ele transita suavemente para o modo rover, com acionamentos por correia em ambos os lados acionando as rodas. Ele é direcionado por um sistema diferencial que ajusta a velocidade de cada acionamento de forma independente.
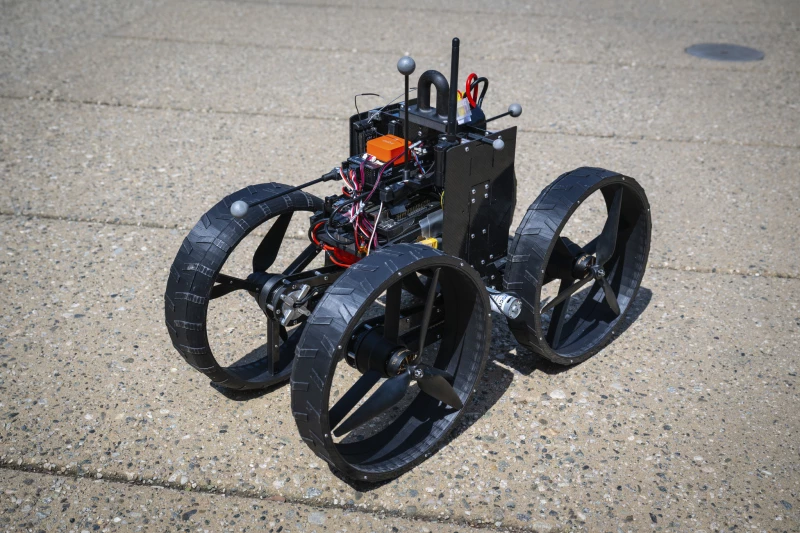
Créditos da imagem: ATMO em modo terrestre Ioannis Mandralis/Engenharia de Comunicações
“Estamos introduzindo um novo tipo de sistema dinâmico nunca antes explorado”, explicou Ioannis Mandralis, autor principal do estudo. “No momento em que o robô começa a se transformar, várias forças dinâmicas começam a interagir. O sistema de controle precisa responder rapidamente a essas mudanças.”
Pesquisadores publicaram recentemente a pesquisa na Communications Engineering, e um vídeo demonstra o ATMO em ação enquanto ele se transforma e manobra em diferentes terrenos.
Leia o Artigo Original New Atlas
Leia mais Atual Helicóptero de Resgate da Força Aérea sem precedentes









