O Humanoide Macio da Toyota Agarra Objectos com Todo o Corpo

Instituto de Investigação da Toyota
A maioria dos robôs humanóides utiliza normalmente as mãos para pegar em objectos, mas este método não imita com precisão o comportamento humano, especialmente quando se trata de objectos volumosos. Os humanos utilizam não só as mãos, mas também o peito, as ancas e os braços nessas situações. O inovador robot macio da Toyota foi concebido tendo em mente esta funcionalidade semelhante à humana.
Um Humanoide de Torso Superior de Inspiração Japonesa
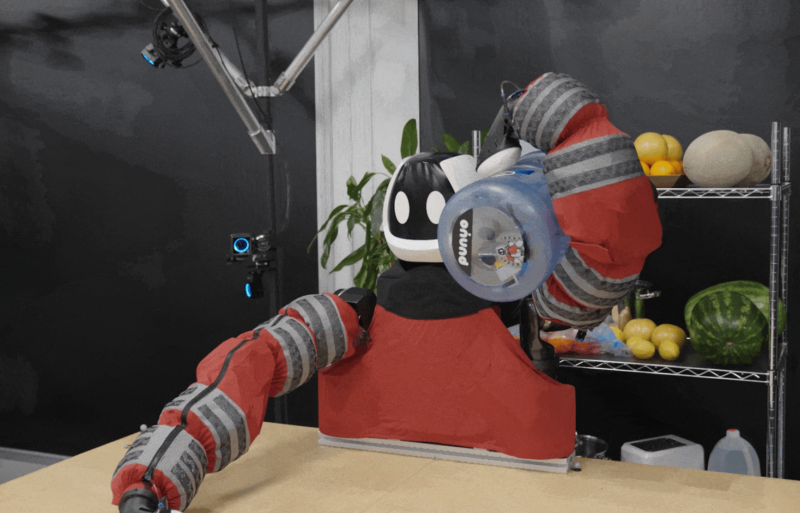
Denominada Punyo, esta plataforma de investigação humanoide centra-se na parte superior do tronco. Em primeiro lugar, incorpora uma estética japonesa encantadora, com uma expressão facial cativante e acolhedora, reminiscente do Baymax de Big Hero 6 da Disney, e uma aparência volumosa e acolhedora. Para aumentar o seu atrativo, Punyo aparece adornado com uma camisola grande e de aspeto acolhedor.
É certo que a “camisola” tem um objetivo essencialmente centrado no abraço. Fabricada com materiais aderentes, forma uma camada macia e flexível sobre a estrutura metálica rígida do Punyo. Além disso, o tecido está equipado com sensores tácteis, permitindo à Punyo perceber com precisão a textura de tudo o que abraça, quer seja uma pessoa ou um objeto que transporta.
Instituto de Investigação da Toyota
Embora a inclusão de mãos hábeis possa ser uma possibilidade futura, o Punyo está atualmente equipado com o que pode ser melhor descrito como cascos insufláveis. A Toyota refere-se a eles como patas, sem quaisquer garras de agarrar. Estes apêndices possuem almofadas insufláveis deformáveis com padrões de pontos nas suas superfícies internas, monitorizados por câmaras. Esta configuração permite que o robô detecte e identifique objectos após o contacto, à medida que os padrões se deformam.
Suavidade Reforçada com Bexigas Cheias de Ar
Para além disso, os braços do Punyo incorporam uma suavidade adicional através de conjuntos de 13 bexigas cheias de ar que se estendem desde os ombros até aos pulsos. Estas bexigas podem ser reguladas individualmente em termos de pressão, optimizando a rigidez com base nas actividades do robô.
Os especialistas em robótica do Grupo de Investigação da Toyota têm estado a treinar o Punyo através da teleoperação para manipular vários objectos de grandes dimensões. Isto envolve técnicas como inclinar-se para a frente para abraçar objectos contra o peito e depois inclinar-se para trás para os levantar. Além disso, o Punyo emprega métodos de transporte mais complexos, como içar um jarro de água para o seu ombro e estabilizá-lo a partir de cima.
Além disso, o robô apresenta uma capacidade notável para manipular vários objectos nos seus braços e o seu movimento ao manipular objectos sugere uma abordagem mais natural em comparação com outros robôs.
O Avanço da Toyota na Aprendizagem de Robôs
Em setembro, a Toyota apresentou um avanço significativo na aprendizagem dos robôs. Os robôs receberam alguns exemplos de várias tarefas de cozinha, tais como espalhar condimentos no pão, descascar batatas, estender massa de pizza e virar panquecas com uma espátula. Através de um sistema de aprendizagem de políticas de difusão, os robôs foram submetidos a execuções de tarefas simuladas durante algumas horas e foram depois capazes de replicar autonomamente as acções que observaram.
A Punyo utiliza um processo de aprendizagem de IA semelhante, com a capacidade adicional de a equipa ajustar as variáveis relativas à proximidade com que imita os movimentos de exemplo ou a importância dada a factores como a velocidade, a eficiência ou a precisão da tarefa.
Esta abordagem difere da que vimos noutros robôs humanóides. Embora o comportamento de levantar abraços possa não ser adequado para todos os cenários, é relevante em situações específicas, especialmente quando estas máquinas se tornarem comuns nas nossas casas, possivelmente até para cuidar dos nossos bebés. É, sem dúvida, um conceito que dá que pensar.
Leia O Artigo Original: New Atlas
Leia Mais: ZenRobotics 4.0 Aumenta a Inteligência na Automatização da Triagem de Resíduos