A Mão MOTIF: Um Passo à Frente na Tecnologia de Mãos Robóticas
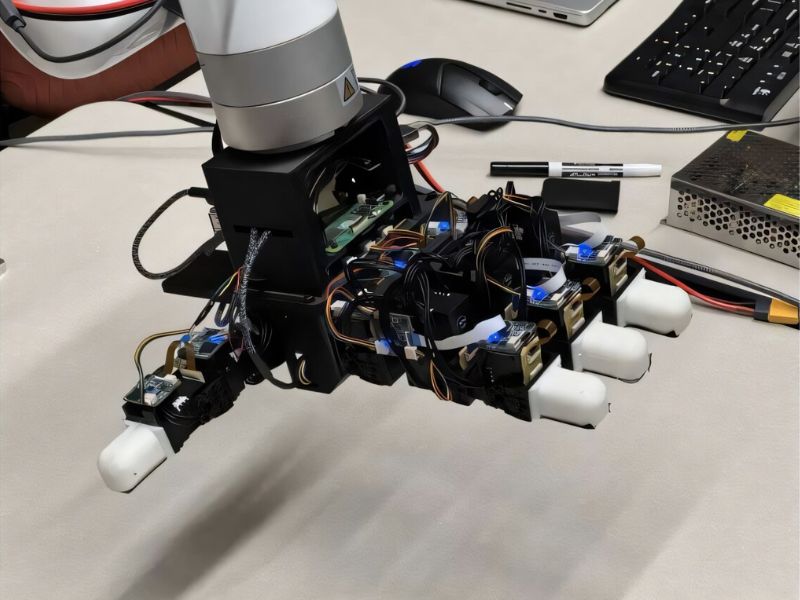
A mão MOTIF, a mão robótica desenvolvida pelos pesquisadores. Créditos da imagem: Zhou et al.
À medida que crescemos, aprendemos a aplicar a quantidade certa de força para mover objetos e a evitar tocar em coisas como uma panela quente com as mãos desprotegidas. Agora, engenheiros criaram uma mão robótica que pode fazer o mesmo.
Uma equipe de estudantes fez parceria com o professor assistente de ciência da computação da USC Viterbi, Daniel Seita, para criar a Mão MOTIF, projetando-a para ser multimodal — equipada com múltiplas funções sensoriais. Ela possui sensores de profundidade, força e temperatura, permitindo detectar e responder a mudanças nessas áreas.
Essas capacidades avançadas de detecção não apenas aumentam as possibilidades de pesquisa em robótica, mas também ajudam a estender a durabilidade da mão, prevenindo danos relacionados ao calor. Além disso, sua sensibilidade à força oferece potencial prático para aplicações no mundo real.
“Em ambientes como fábricas, os robôs precisam aplicar força para mover objetos para o lugar, o que significa que eles precisam medir quanta força estão usando”, explicou Seita. “Um sensor de força como este pode ser muito útil para garantir que o robô esteja aplicando a quantidade correta de pressão.”
“Nunca vimos ninguém construir uma mão como esta antes”, acrescentou.
Inovação Aquecida
A Mão MOTIF é uma evolução da Mão LEAP, desenvolvida por uma equipe de pesquisa da Carnegie Mellon em 2023. Seu principal avanço reside na incorporação de capacidades sensoriais semelhantes às humanas. Segundo Seita, o realismo e a precisão da Mão MOTIF permitem usos que vão da fábrica à cozinha e à soldagem.
A capacidade de detecção de temperatura do robô vem de uma câmera térmica embutida na palma da mão. Seita e sua equipe de alunos de pós-graduação da USC Viterbi se propuseram a projetar uma mão que imitasse a percepção humana da temperatura.
“Quando cozinhamos, frequentemente colocamos a mão perto de uma panela quente para avaliar sua temperatura antes de tocá-la, o que nos ajuda a evitar queimaduras ou ferimentos”, explicou Seita. “Queríamos dar aos robôs esse mesmo tipo de instinto.”
Hanyang Zhou, coautor do artigo de pesquisa “A mão MOTIF: uma mão robótica para observações multimodais com sensores térmicos, inerciais e de força” e recente mestrando em ciência da computação pela Escola Viterbi, explicou que o sistema detecta a temperatura intuitivamente posicionando a mão perto do objeto.
“Questionamo-nos se haveria uma maneira de captar um sinal sem precisar fazer contato”, disse Zhou. “É por isso que colocamos uma câmera infravermelha diretamente na palma da mão.” O artigo está atualmente disponível no servidor de pré-impressão arXiv.
Em outras palavras, a Mão MOTIF consegue detectar a temperatura usando sua câmera térmica sem fazer contato — basta aproximar a mão de um objeto para que a câmera detecte seu calor.

A mão proposta do MOTIF. Créditos da imagem: Zhou, Lou, Liu, et al.
Você Precisa Experimentar em Primeira Mão”
Seita, Zhou e sua equipe buscaram tornar a detecção de temperatura e força mais natural, espelhando a forma como os humanos vivenciam essas sensações. Por exemplo, a força é invisível aos olhos e só é compreendida através do tato. A Mão MOTIF foi projetada para replicar essa compreensão tátil, permitindo respostas robóticas mais realistas à força, como medir o peso de um objeto.
“Nós, humanos, não conseguimos ver a força; precisamos senti-la. Mas como uma mão robótica pode fazer o mesmo?”, questionou Zhou. “Se não tenho certeza se uma garrafa de água está cheia, eu simplesmente a sacudo ou agito para descobrir.”
Os sensores IMU integrados à Mão MOTIF permitem que ela realize esse teste básico, permitindo que a mão robótica sacuda ou agite um objeto para avaliar seu peso, de forma semelhante à de um humano.
Com base na Mão LEAP de código aberto da Carnegie Mellon, Seita e sua equipe planejam tornar a Mão MOTIF também de código aberto para desenvolver ainda mais essa tecnologia sensorial.
Tornar a pesquisa disponível abertamente é crucial para o progresso na área”, disse Seita. “Quanto mais pessoas usarem nossa mão, mais ela beneficiará a comunidade científica.”
Zhou se referiu às melhorias sensoriais da Mão MOTIF como uma “plataforma” que ele espera que sirva de base para o desenvolvimento da comunidade robótica em geral.
“Queremos torná-la simples e acessível para o maior número possível de equipes de pesquisa, desde que estejam interessadas nesse tipo de plataforma”, disse Zhou.
Leia o Artigo Original Tech Xplore
Leia mais Os Humanos Veem um Robô Colaborador Como Parte de si Mesmos






