Máquinas Imitam Movimentos Humanos Para Evitar Escorregões

Créditos:techxplore
Para lidar com diversas tarefas do mundo real, os robôs precisam agarrar com segurança objetos de vários formatos, texturas e tamanhos sem deixá-los cair acidentalmente. Os métodos tradicionais melhoram isso aumentando a força de preensão da mão robótica para evitar deslizamentos.
Pesquisadores desenvolvem controle de movimento bioinspirado para evitar deslizamentos em mãos robóticas
Pesquisadores de diversas universidades e laboratórios propuseram novos métodos para impedir que objetos escorreguem das mãos robóticas. Sua técnica ajusta os caminhos de movimento que a mão segue durante a manipulação, em vez de depender apenas da força de preensão. O sistema, que combina um controlador robótico com modulação de trajetória bioinspirada, foi detalhado na Nature Machine Intelligence.
“A ideia para este trabalho foi inspirada em uma experiência humana familiar”, disse Amir Ghalamzan, autor sênior do estudo, em entrevista à Tech Xplore.
Ensinando robôs a ajustar movimentos como humanos para proteger objetos frágeis
Ao sentir que um objeto delicado pode escorregar, as pessoas ajustam os movimentos — desacelerando, inclinando ou mudando de posição — em vez de apenas apertar a pegada. Em contraste, os robôs tradicionalmente dependem do aumento da força de preensão, o que pode ser ineficaz e até mesmo danificar itens frágeis. Nosso objetivo era explorar maneiras de fazer os robôs responderem mais como humanos em tais situações”, explicou Ghalamzan.

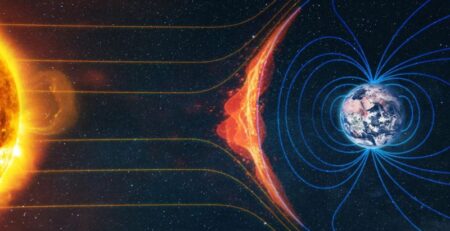
Crédito:Figure illustrating the predictive control architecture in humans based on t
“Nosso método replica a maneira como os humanos dependem de modelos internos para interagir com o ambiente”, disse Ghalamzan. Assim como o cérebro antecipa ações, o ‘modelo de mundo’ do robô, baseado em dados, prevê feedback tátil para detectar e prevenir deslizes com antecedência.
O controlador permite que os robôs ajustem a velocidade, a direção e a posição das mãos em tempo real, em vez de apenas aumentar a força de preensão. Ao fixar objetos por meio de ajustes de movimento, esse método pode reduzir o risco de danos a itens delicados. Também funciona quando a força de preensão não pode ser alterada, permitindo interações mais fluidas e inteligentes.
Novo controlador de deslizamento baseado em movimento aprimora o controle da força de preensão
“Nossa pesquisa traz duas grandes inovações”, explicou Ghalamzan. Primeiro, apresentamos um controlador de deslizamento baseado em movimento exclusivo que complementa o controle da força de preensão, útil quando aumentar a preensão não é possível.
“Em segundo lugar, desenvolvemos um controlador preditivo acionado por um modelo tátil avançado aprendido, ou ‘modelo de mundo’, que permite que os robôs antecipem o deslizamento com base em suas ações pretendidas.”
A equipe aplicou o novo controlador para planejar os movimentos de uma pinça robótica e o testou em ambientes dinâmicos e não estruturados. Em vários casos, ele melhorou notavelmente a estabilidade da preensão, superando os controladores convencionais que dependem exclusivamente do ajuste da força de preensão.
Modelo mundial pode ampliar as capacidades dos robôs no mundo real
Leia o artigo original em: Techxplore
Leia mais:Mão Robótica Demonstra Habilidade Realista em Tarefas Complexas de Laboratório