Robô Nadador Canaliza seu Cão interior para Dominar o Nado Canino

Crédito: Ter a capacidade de nadar pode ser muito útil para um robô quadrúpede IOP Publishing
Embora os “cães robôs” quadrúpedes possam imitar a maneira como os cães reais se movem em terra com relativa precisão, suas habilidades de natação frequentemente deixam a desejar — embora alguns consigam andar debaixo d’água. Esse não é o caso de um robô de pequena escala recém-desenvolvido, projetado especificamente para nadar com eficiência usando o clássico nado canino.
Apresentando o Cão Robô Anfíbio (CRO)
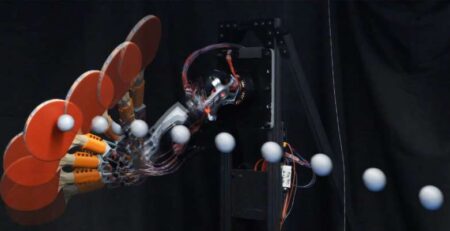
Batizado de Cão Robô Anfíbio (CRO), o robô mede 30 cm de comprimento e 10 cm de largura, pesando aproximadamente 2,25 kg. Ele foi desenvolvido por uma equipe de pesquisa liderada pelos professores Yunquan Li e Ye Chen, da Universidade de Tecnologia do Sul da China.

O robô ARD, em toda a sua glória anfíbia Yunquan Li
Em terra, o CRO usa um trote impulsionado por pernas duplamente articuladas, atingindo velocidades de até 1,2 comprimentos corporais por segundo. Na água, apesar da maior resistência, ele ainda consegue nadar a 0,54 comprimentos corporais por segundo — um desempenho comparável ao de cães reais, que atingem cerca de 1,4 LB/s ao nadar canino, de acordo com estudos anteriores.
Variantes do Nado Canino: Andamentos LSPG
Dois desses estilos eram variações do anado canino, denominados “andamentos de remada em sequência lateral” (LSPGs). Esses estilos envolviam mover as quatro pernas do robô em uma sequência específica: dianteira esquerda, traseira esquerda, dianteira direita e traseira direita.
As duas versões do LSPG diferem no tempo que cada perna permanece na “fase de potência” — a parte do ciclo em que a perna se estende para gerar impulso. Em uma versão, as pernas se moviam independentemente, com 25% do ciclo gasto na fase de potência. Na outra, os movimentos das pernas se sobrepunham, aumentando a fase de potência para 33%, assemelhando-se mais ao nado canino natural.
O terceiro estilo de nado, chamado de “andamento de remada semelhante ao trote” (TLPG), consistia em pares de patas diagonalmente opostos se movendo simultaneamente — a dianteira esquerda com a traseira direita, depois a dianteira direita com a traseira esquerda — resultando em uma fase de potência de 50%.
Testes em piscina mostraram que o LSPG de 33% foi o mais rápido, atingindo 0,54 BL/s, seguido de perto pela versão de 25%. O TLPG foi o mais lento, mas provou ser o mais estável.
Essa inovação representa um grande passo no desenvolvimento da robótica inspirada na natureza, disse o Professor Li. A capacidade do nosso cão-robô de se mover com eficiência tanto em terra quanto na água vem de seu planejamento de trajetória bioinspirado, que imita o movimento natural de remada de cães reais.
Leia o Artigo Original New Atlas
Leia mais Máquinas de Robótica Cósmica podem Acelerar a Instalação de Painéis Solares







Deixe um comentário