Um Robô Inspirado no Pangolim Deposita Sementes de Árvores nos Buracos que Escava

O robô Plantolin, inspirado no pangolim, que cava buracos e deposita bombas de sementes Universidade de Surrey
Pangolins forrageiros naturalmente cavam o solo, então por que não fazê-los plantar árvores ao mesmo tempo? Treiná-los para isso seria bastante desafiador, e é por isso que uma estudante do ensino médio da Califórnia chamada Dorothy criou um robô inspirado no pangolim para realizar a escavação e o plantio.
Chamado de Plantolin, este robô bioinspirado é o mais novo vencedor do Concurso Anual de Robótica Natural, organizado pela Universidade de Surrey e patrocinado pela Sociedade Ecológica Britânica.
Visão Geral da Competição de Robôs Inspirados na Natureza
Resumidamente, a competição incentiva participantes de todo o mundo a enviar conceitos de robôs inspirados na natureza que possam contribuir para a sustentabilidade ambiental. A ideia vencedora é desenvolvida em um protótipo funcional por um ou mais institutos de pesquisa colaboradores.
No caso do Plantolin, a Universidade de Surrey serviu como parceira. Outros colaboradores incluem a Queen Mary University of London, o Royal College of Art, a EPFL Lausanne (Suíça), a Universidade Técnica de Munique e a Universidade Alexander Humboldt (Alemanha). O vencedor anterior foi um peixe robótico projetado para filtrar partículas de microplásticos da água.

Uma visão sem revestimento do Plantolin, junto com algumas de suas “bombas de sementes” – o design de Dorothy superou 183 outras inscrições. Universidade de Surrey.
Imitando a Natureza
Assim como um pangolim caminha de maneira desajeitada sobre suas duas patas traseiras, o Plantolin se equilibra sobre duas rodas, de forma semelhante a um Segway. Cada roda é movida por um motor elétrico de drone quadricóptero. A longa cauda é levantada para funcionar como um contrapeso enquanto o robô se move, mas se inclina para baixo para dar alavancagem quando ele para para cavar.
A escavação é realizada por duas pernas dianteiras motorizadas. Essas pernas têm garras que permanecem travadas na posição enquanto escavam o solo, mas se dobram para trás de forma passiva ao serem puxadas para frente para outra escavação.
Dispersão Eficiente de Sementes
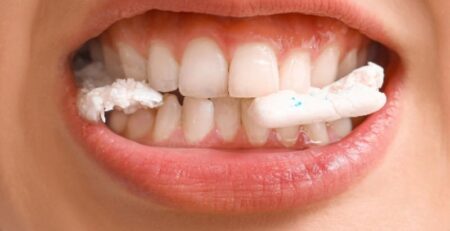
Depois de cavar o buraco, o Plantolin se move sobre ele, soltando uma “bomba de sementes” de árvore (essencialmente um pequeno aglomerado de sementes e solo) no buraco enquanto passa. Essas bombas de sementes são carregadas em um dispensador através de uma abertura na parte superior do robô e transportadas por uma esteira interna até a parte “traseira” para serem liberadas.

Só para referência, aqui está uma foto de um pangolim real. Depositphotos
“A restauração das florestas pelo plantio de mais árvores é crucial para o desenvolvimento sustentável do nosso planeta”, afirma Dorothy. “Como os pangolins frequentemente cavam o solo, eu acreditei que um robô plantador inspirado em seu comportamento pareceria muito natural.”
Por fim, o Plantolin foi criado pelo Dr. Robert Siddall, um roboticista da Universidade de Surrey, que detalha a funcionalidade do robô no vídeo abaixo.
Plantolin: Vencedor do 2º Concurso de Robótica Natural
Leia o Artigo Original New Atlas
Leia mais Luvas Especiais! Tocando o Piano com Toque Robótico