Verificar: Este versátil mecanismo ativo de articulação de esferas

Os ABENICS podem rolar, inclinar-se e guinar em todas as direcções. Universidade de Yamagata
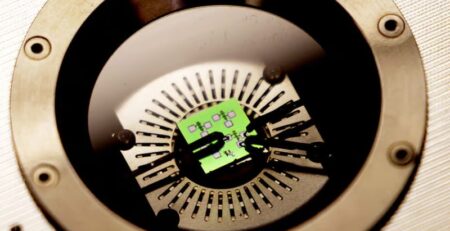
Na sua essência, este sistema criado na Universidade de Yamagata, no Japão, utiliza uma “simples” engrenagem esférica cruzada combinada com uma engrenagem monopolar para gerir a inclinação, a rotação e a guinada. Isto imita toda a amplitude de movimento encontrada numa coifa dos rotadores humana (o ombro). Graças a movimentos inovadores de engrenagem, acoplamento e deslizamento, a engrenagem ABENICS atinge uma precisão notável nas suas operações.
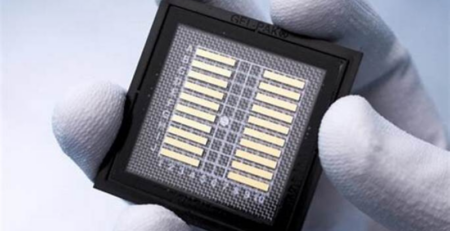
Ao integrar uma segunda engrenagem monopolar e diferenciais em tandem ligados a uma junta esférica, este sistema torna-se ainda mais potente. Os operadores podem realizar movimentos altamente precisos e de elevado binário na engrenagem esférica com uma precisão excecional.
Controlo melhorado da articulação robótica para um movimento natural
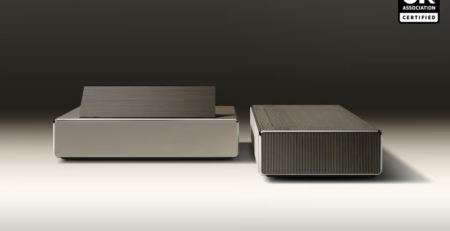
Quando ligado a uma ligação de saída, como um braço ou uma perna, este sistema oferece um controlo preciso sobre uma articulação robótica realista, permitindo um movimento suave e natural. Normalmente, os robôs humanóides actuais utilizam duas ou mais articulações motorizadas para o ombro: uma para o movimento vertical, outra para o movimento para a frente e para trás e uma terceira para a rotação.
O ABENICS – abreviatura de Active Ball Joint Mechanism With Three Degrees of Freedom Based on Spherical Gear Meshings (Mecanismo de articulação esférica ativa com três graus de liberdade baseado em malhas de engrenagens esféricas) – poderia simplificar estas concepções de articulações, integrando uma gama completa de movimentos numa única articulação.

A engrenagem da junta esférica ativa ABENICS permite um movimento extremamente preciso e de elevado binário. Universidade de Yamagata
Este tipo de engrenagem ainda não foi amplamente adotado em aplicações comerciais, médicas ou industriais. Embora tenha sido explorada principalmente em contextos académicos e de investigação, a tecnologia é muito promissora para utilização futura em domínios que exijam um binário elevado, precisão e movimento tridimensional.
Aplicações ilimitadas das articulações ABENICS na robótica
As aplicações potenciais para robôs equipados com articulações ABENICS são ilimitadas. Os cirurgiões poderiam realizar procedimentos laparoscópicos delicados e minimamente invasivos com uma precisão e um controlo notáveis. Da mesma forma, os pacientes poderiam visitar o dentista com confiança, sabendo que estavam em mãos capazes para limpezas de rotina.

A utilização de duas engrenagens monopolares de acionamento sobre uma engrenagem esférica cruzada permite 360 graus de amplitude total de movimento. Universidade de Yamagata
Os veículos de aterragem e as naves espaciais poderiam ser equipados com braços altamente flexíveis para agarrar, enganchar ou mesmo construir habitats humanos na Lua ou efetuar reparações na Estação Espacial Internacional (pelo menos até a SpaceX desativar a ISS). Imagine um módulo de aterragem lunar concebido como uma escavadora-aranha, equipado com articulações ABENICS.
As aplicações potenciais parecem ilimitadas, e observá-las em ação é cativante – se não mesmo um pouco alucinante.
E imaginem quantos mais animais de peluche poderíamos apanhar no jogo Claw Machine no salão de jogos!
Leia o Artigo Original: New Atlas
Leia mais: Tecnologia de Aceleradores de Partículas do CERN Trata agora Tumores Cerebrais