Bugbots do Oceano das Coisas que se Alimentam de Água usam Células de Combustível Alimentadas por Bactérias
Universidade de Binghamton
Os investigadores criaram protótipos de insectos-robôs equipados com sensores que reproduzem sistemas digestivos biológicos para gerar energia, utilizam uma interface Janus para um fornecimento contínuo de nutrientes e deslizam sobre a água como os salteadores aquáticos.
Em 2017, a DARPA apresentou um programa para desenvolver e instalar milhares de sensores flutuantes para recolher dados ambientais, incluindo a temperatura do oceano, as condições do mar e os movimentos de navios comerciais, aeronaves e mamíferos marinhos.
No entanto, com o nome de Oceano das Coisas, este projeto assemelha-se à rede de dispositivos inteligentes carregados de sensores da Internet das Coisas. De acordo com a página do projeto, os dados destes sensores serão carregados para o armazenamento em nuvem do governo para análise. O Oceano das Coisas apoiará as operações militares e estará acessível a instituições de investigação e entidades comerciais.
O Professor Seokheum Choi desenvolve um robô aquático movido a bactérias com financiamento da Investigação Naval
O Professor Seokheum Choi, da Universidade de Binghamton, está a desenvolver um dispositivo deste tipo há cerca de uma década, com financiamento do Gabinete de Investigação Naval. Choi e a sua equipa criaram agora um pequeno robô aquático que desliza à superfície da água e é alimentado por bactérias a bordo, em vez de fontes de energia tradicionais como os sistemas solar, cinético ou térmico.
O artigo da equipa destaca os esforços em curso para desenvolver robôs auto-sustentáveis que aproveitem a energia do seu ambiente marinho. Estes métodos incluem a utilização da energia solar, da energia cinética das ondas ou das correntes, do potencial osmótico da água salgada, dos gradientes térmicos e das fontes de energia impulsionadas pela humidade.
No entanto, os investigadores salientam que a disponibilidade inconsistente de luz e energia mecânica em ambientes marinhos, juntamente com os rendimentos limitados de energia dos gradientes de salinidade, diferenças térmicas e humidade, colocam desafios significativos. Estas limitações tornam difícil garantir o funcionamento fiável e contínuo dos robôs aquáticos com base apenas nas actuais tecnologias de recolha de energia.

Universidade de Binghamton
Nova central eléctrica utiliza célula de combustível microbiana com Bacillus subtilis para converter matéria orgânica em eletricidade
A central eléctrica do novo sistema utiliza uma célula de combustível microbiana que inclui bactérias Bacillus subtilis formadoras de esporos. Este mini-gerador, inspirado na digestão biológica, converte matéria orgânica em eletricidade através de reacções redox catalíticas.
“Quando as condições são ideais, as bactérias tornam-se activas e geram energia, mas se as condições forem más – como o frio extremo ou a falta de nutrientes – elas voltam a formar esporos”, explicou Choi. “Isto permite-nos prolongar a vida operacional”.
O ânodo da célula de combustível é feito de tecido de carbono revestido a polipirrol, escolhido pela sua excelente condutividade e capacidade de suportar o crescimento bacteriano. O cátodo, também em tecido de carbono, é revestido com polipirrol e platina para aumentar a redução do oxigénio. É utilizada uma membrana de Nafion 117 para a transferência selectiva de protões.
A central inclui superfícies hidrofóbicas e hidrofílicas para facilitar o fluxo unidirecional de substratos orgânicos da água do mar, fornecendo nutrientes aos esporos bacterianos.
Uma única célula de combustível fornece 135 µW cm-2; um conjunto de seis unidades produz quase um miliwatt, alimentando o motor e os sensores
Enquanto uma única configuração de célula de combustível alcançou uma densidade de potência máxima de 135 µW cm-2 e uma tensão de circuito aberto de 0,54 V, a ampliação para um conjunto de seis unidades produziu quase um miliwatt de potência. Embora modesta, esta potência é suficiente para alimentar o pequeno motor DC e os sensores a bordo.
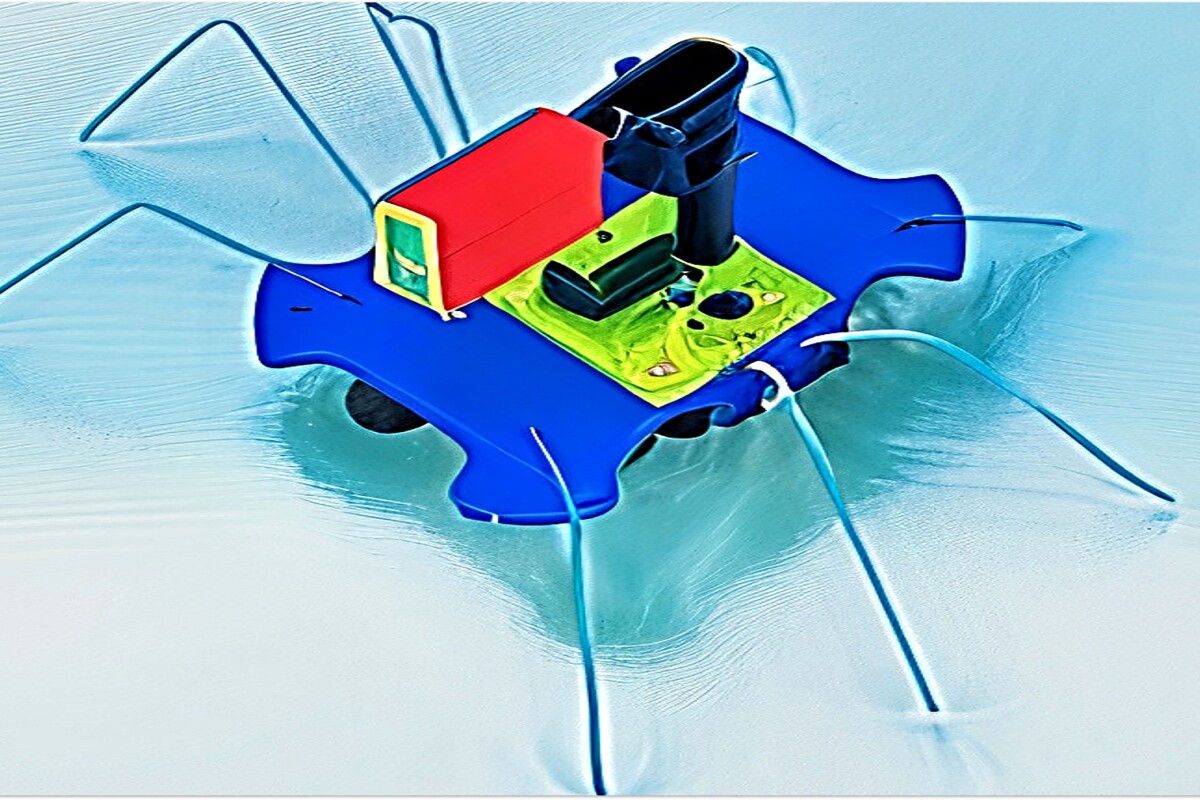
Para garantir um movimento suave, o robô utiliza a força de rotação do motor para se propulsionar através da água sem empurrar diretamente contra ela, com o seu design hidrofóbico a ajudar à flutuabilidade. Além disso, as pernas do robô estão revestidas com uma camada hidrofóbica para o ajudar a deslizar sobre a superfície da água, como um strider aquático.
O objetivo é utilizar frotas de pequenos colectores de dados conforme necessário, em vez de ficarem limitados a um único local durante toda a sua vida operacional.
“Embora esta investigação mostre com sucesso que é possível conseguir uma mobilidade auto-sustentada em superfícies de água utilizando uma matriz MFC integrada, as aplicações práticas, como a localização, deteção e processamento de sinais para robôs aquáticos, ainda precisam de ser desenvolvidas”, observou a equipa.
É necessário trabalho adicional para avaliar o desempenho a longo prazo e a adaptabilidade a diferentes condições ambientais. No entanto, o sistema atual demonstra a viabilidade desta conceção inovadora.
Leia o Artigo Original: New Atlas
Leia mais: Veja: Robodog com Rodas Vence Paredes, Móveis e Escadas