Robô que Salta de Asteroide Passa no Teste de Avião a Zero G
ETH Zurique
Um robô com três pernas poderá em breve atravessar superfícies de asteróides em busca de minerais valiosos. Batizado de SpaceHopper, o robô foi recentemente submetido a testes durante um voo de avião em gravidade zero.
A iniciativa SpaceHopper arrancou há dois anos e meio, tendo tido origem num projeto de investigação de estudantes da Universidade ETH de Zurique, na Suíça.
Explorar Corpos Celestes de Baixa Gravidade
O seu objetivo é enfrentar a tarefa de explorar eficazmente objectos celestes de baixa gravidade, como asteróides e luas. Estes corpos contêm reservas potenciais de materiais vitais, como metais de terras raras, e oferecem informações sobre as origens do universo.
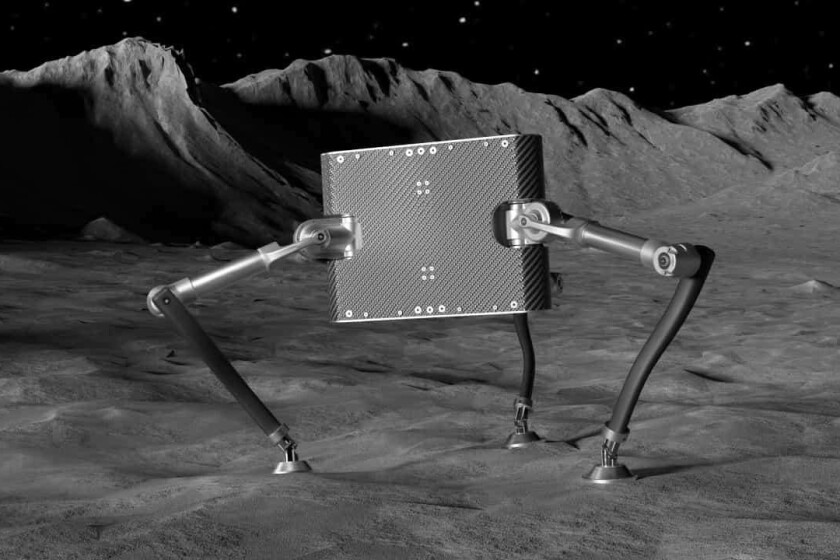
O robô SpaceHopper, na sua forma atual, apresenta uma estrutura triangular de alumínio aeroespacial com pernas articuladas em cada vértice. Cada perna incorpora uma articulação do joelho e da anca, com dois motores a impulsionar a anca através de um sistema de acionamento diferencial e outro motor a controlar o joelho.

ETH Zurique/Jorit Geurts
O software de bordo, baseado na aprendizagem profunda, orquestra as acções coordenadas das pernas, permitindo que o robô execute uma série de tarefas definidas. Estas tarefas incluem iniciar saltos, assegurar o alinhamento correto do robô durante o voo e executar aterragens controladas em locais designados.
Durante a fase de salto, os nove motores das pernas colaboram para impulsionar o SpaceHopper para cima a partir da superfície do asteroide. Enquanto está no ar, o robô ajusta a sua posição estendendo ou retraindo as pernas de forma selectiva para gerir o seu centro de massa. Ao aterrar, as pernas flectem para absorver o impacto e manter a estabilidade do robô, impedindo-o de tombar.
Testes Laboratoriais em Ambiente Simulado de Baixa Gravidade
Os primeiros ensaios destas capacidades tiveram lugar num laboratório da ETH Zurich, onde o robô foi fixado a um contrapeso e a um gimbal rotativo para reproduzir o ambiente de baixa gravidade do planeta anão Ceres.
No entanto, no final do ano passado, membros da equipa de estudantes tiveram a oportunidade de acompanhar o SpaceHopper num voo parabólico Air Zero G organizado pela Agência Espacial Europeia e pela empresa francesa Novespace. Estes voos envolvem um avião Airbus A310 que executa uma sequência de arcos ascendentes e descendentes, induzindo breves períodos de ausência de peso no interior do avião.

Nicolas Courtioux
Durante o voo de 2023, o robô conseguiu sair do chão do avião numa direção predeterminada e manteve o alinhamento correto enquanto estava no ar. Os momentos mais importantes destes ensaios são apresentados no vídeo que acompanha a notícia.
Vale a pena mencionar que um projeto anterior de uma equipa da ETH Zurich resultou na criação de um robô explorador de asteróides de quatro patas chamado SpaceBok. A configuração do SpaceHopper com três pernas tem como objetivo minimizar o tamanho e o peso em comparação com o design do SpaceBok. De facto, pesando apenas 5,2 kg (11,5 lb) no total, o robô poderia potencialmente ser transportado e lançado a partir de um satélite CubeSat compacto não tripulado.
Leia O Artigo Original: New Atlas
Leia Mais: Um Robô Omnidirecional que se Move por Deslocação, Arrastamento e Escalada









