Uma Mão Robótica Emprega Toque, em Vez de Visão, para Manipular e Girar Objetos

Cientistas da Universidade de San Diego, na Califórnia, desenvolveram uma nova abordagem, inspirada na destreza humana, para permitir que uma mão robótica gire objetos apenas por meio do toque, eliminando a necessidade de informações visuais.
A equipe equipou uma mão robótica de quatro dedos com 16 sensores de toque na palma e nos dedos. Esses sensores de toque de baixo custo e baixa resolução, cada um custando cerca de US$ 12, podem detectar se um objeto está em contato com eles ou não, fornecendo sinais binários simples.
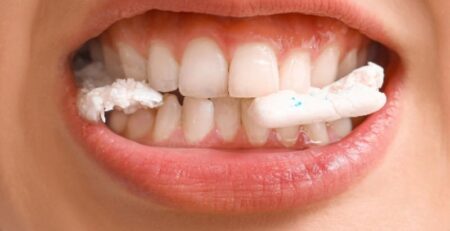
A mão robótica utiliza essa informação baseada em toque para girar suavemente uma ampla gama de objetos, incluindo pequenos brinquedos, latas, frutas e vegetais, sem causar danos.
Habilitando robôs para manipular objetos em ambientes com pouca luz e visão limitada
Entretanto, esta técnica inovadora mostra-se promissora ao permitir que os robôs manipulem objetos na escuridão ou em ambientes onde a percepção visual é limitada. A equipe apresentou seu trabalho na 2023 Robotics: Science and Systems Conference, destacando as possíveis aplicações de seu método de rotação baseado em toque.
Em contraste com outras abordagens que dependem de alguns sensores de toque de alta resolução colocados na ponta dos dedos, este método dispersa muitos sensores de baixo custo em uma área maior da mão robótica, oferecendo vantagens e versatilidade únicas.
Xiaolong Wang, professor especializado em engenharia elétrica e de computação na UC San Diego e principal pesquisador deste estudo, apontou vários problemas com os métodos atuais de manipulação robótica das mãos.
Desafios na detecção e percepção da mão robótica
Em primeiro lugar, o uso de um número limitado de sensores na mão robótica reduz a probabilidade de contato com objetos, restringindo assim a capacidade do sistema de detectar seus arredores. Em segundo lugar, a complexidade e o custo da simulação de sensores de toque de alta resolução que fornecem informações de textura os tornam impraticáveis para experimentos do mundo real. Por fim, muitas abordagens existentes dependem fortemente do feedback visual.
Portanto, para superar esses desafios, Wang e sua equipe de pesquisa propõem uma solução simples. No entanto, eles demonstram que informações detalhadas de textura sobre um objeto são desnecessárias para a tarefa em questão. Em vez disso, eles descobrem que sinais binários indicando se os sensores fizeram contato com o objeto ou não são suficientes e muito mais fáceis de simular e implementar em cenários do mundo real.
Vantagens de uma matriz abrangente de sensores de toque binário para rotação de objetos robóticos
Os pesquisadores enfatizam que o uso de uma ampla gama de sensores de toque binários fornece dados suficientes sobre a estrutura e orientação 3D do objeto, permitindo que a mão robótica gire objetos de forma eficaz sem depender de pistas visuais.
Para treinar seu sistema, a equipe utilizou simulações de uma mão robótica virtual manipulando vários objetos, incluindo os de formato irregular.
O sistema rastreia quais sensores na mão fazem contato com o objeto durante a rotação, juntamente com as posições e movimentos anteriores das articulações da mão. Com essas informações, o sistema orienta a mão robótica nos movimentos articulares necessários para as próximas etapas do processo de rotação.
Testes da vida real e desempenho de rotação de objetos
Após um treinamento de simulação bem-sucedido, os pesquisadores testaram o sistema com uma mão robótica física em objetos desconhecidos. A mão robótica foi capaz de girar diferentes objetos, como um tomate, pimenta, uma lata de manteiga de amendoim e um pato de borracha de brinquedo (o mais desafiador por seu formato), sem parar ou perder o controle. Enquanto objetos com formas mais complexas exigiam mais tempo para girar, a mão robótica ainda era capaz de girá-los em diferentes eixos.
No futuro, Wang e sua equipe planejam expandir sua abordagem para lidar com tarefas de manipulação mais complexas, como permitir que mãos robóticas peguem, joguem e façam malabarismos com objetos. O objetivo final é equipar os robôs com destreza nas mãos, uma habilidade que vem naturalmente para os humanos, mas representa desafios significativos para os robôs dominarem.
Conseguir isso aumentaria muito a gama de tarefas que os robôs podem realizar. O trabalho de pesquisa intitulado “Girar sem ver: rumo à destreza manual por meio do toque” lista os co-autores Binghao Huang, Yuzhe Qin, UC San Diego; e Zhao-Heng Yin e Qifeng Chen, HKUST, com o asterisco indicando contribuições iguais para o trabalho.
Leia o artigo original em: Science Daily.
Leia mais: Uma Estrutura Protegida Peculiar Liga Nós Viking com Vórtices Quânticos







Comments (2)
[…] Leia mais: Uma Mão Robótica Emprega Toque, em Vez de Visão, para Manipular e Girar Objetos […]
[…] Leia mais: Uma Mão Robótica Emprega Toque, em Vez de Visão, para Manipular e Girar Objetos […]
Comments are closed.