A Trepadeira Auto-dirigida de Inspiração Biológica procura Luz e Calor
Crédito: IEEE Spectrum
Durante um longo período de evolução, as trepadeiras aperfeiçoaram a capacidade de encontrar a luz e crescer em direção a ela, assegurando o seu acesso à luz solar necessária à sobrevivência. Recentemente, os cientistas criaram um robô rastejante inspirado nas trepadeiras, capaz de imitar este comportamento, deslocando-se em direção a fontes de luz e calor. Esta inovação é descrita em pormenor num estudo publicado no mês passado na revista IEEE Robotics and Automation Letters.
Shivani Deglurkar, candidata a doutoramento em Engenharia Mecânica e Aeroespacial na Universidade da Califórnia, em San Diego, participou na conceção destas ” trepadeiras” automatizadas. Devido à sua capacidade de procurar luz e calor, o sistema não necessita de um intrincado controlador centralizado. As ” trepadeiras” navegam autonomamente em direção a um alvo específico. Além disso, mesmo que algumas das trepadeiras ou raízes sejam danificadas ou removidas, as outras continuam a funcionar sem problemas, como salientado por Deglurkar.
Embora a tecnologia esteja na sua fase inicial, Deglurkar prevê as suas potenciais aplicações no rastreio solar e, possivelmente, na deteção e combate a incêndios.
O Atuador Fototérmico da Série de Mudança de Fase (PPSA)
A equipa de Deglurkar criou um atuador único para permitir que o dispositivo se mova instintivamente em direção ao calor e à luz. Este inovador atuador, designado por Atuador Fototérmico de Série de Mudança de Fase (PPSA), utiliza um foto-absorvente num fluido de baixo ponto de ebulição alojado em várias pequenas bolsas ao longo do corpo da trepadeira.
Quando iluminadas, as PPSAs absorvem a luz, aquecem, incham com vapor e encolhem. Devido à pressão, esticam-se, libertando material das suas pontas. Simultaneamente, as PPSAs do lado que está virado para a luz contraem-se, fazendo com que essa parte do robô encurte e se oriente para a fonte de luz ou de calor, como esclarece Deglurkar.
Criar Inovação para um Movimento Instintivo em Direção à Luz e ao Calor
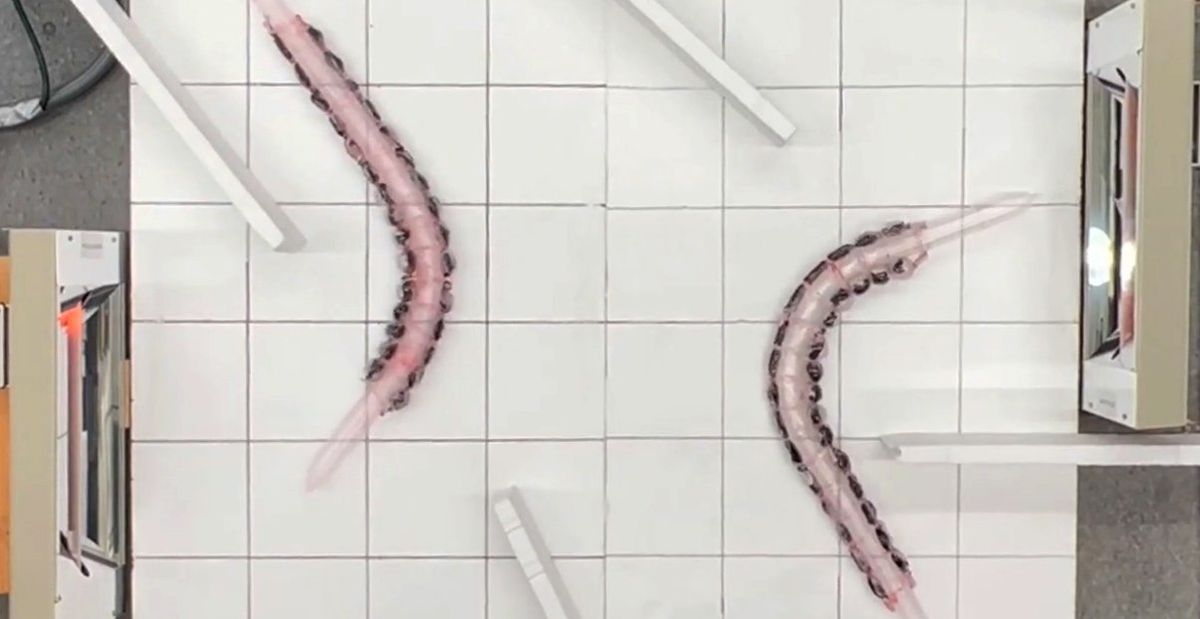
A equipa realizou testes posicionando o sistema a várias distâncias de uma fonte de luz infravermelha. Verificaram que o dispositivo se move em direção à fonte a curtas distâncias e que a intensidade da luz influencia a sua eficácia. Fontes de luz mais substanciais permitem que o dispositivo se curve mais eficazmente em direção à fonte de calor.
Os PPSAs requerem aproximadamente 90 segundos para uma volta completa da trepadeira. Entretanto, o dispositivo demonstrou a capacidade de contornar obstáculos, impulsionado pela sua inclinação natural para procurar fontes de luz e calor.
Charles Xiao, candidato a doutoramento em Engenharia Mecânica na Universidade da Califórnia, em Santa Bárbara, ajudou a co-desenhar a trepadeira. Ele mostrou-se surpreendido com a sua capacidade de reação em condições de iluminação escassas. Xiao salienta que, embora a luz solar seja normalmente de cerca de 1000 W/m2, o robô demonstrou funcionalidade com uma fração da intensidade solar. Este facto contrasta com sistemas semelhantes que exigem uma iluminação superior à de um único sol.
A Principal Vantagem da Trepadeira Automatizada
Xiao salienta que a principal vantagem da trepadeira automatizada reside na sua simplicidade e na sua relação custo-eficácia. No entanto, antes de a introduzir no mercado ou de a utilizar em cenários de combate a incêndios, é necessário um maior aperfeiçoamento. Xiao observa que o sistema responde lentamente a sinais de luz e calor e não foi especificamente concebido para aplicações a altas temperaturas.
Os protótipos subsequentes têm de apresentar um melhor desempenho a altas temperaturas e possuir a capacidade de detetar incêndios para uma utilização prática. Por conseguinte, Deglurkar descreve os próximos objectivos da sua equipa, que consistem em aperfeiçoar os actuadores para que estejam mais sintonizados com os comprimentos de onda emitidos pelos incêndios e melhorar a sua capacidade de resposta com tempos de resposta mais rápidos.
Leia o Artigo Original: IEEE SPECTRUM
Leia Mais: Os Pandas Gigantes usam uma Rede Social Semelhante ao “Facebook” para Comunicar