Raia-Manta Robótica e Aerodinâmica Nada Mais Rápido com um Design Simplificado e Eficiente

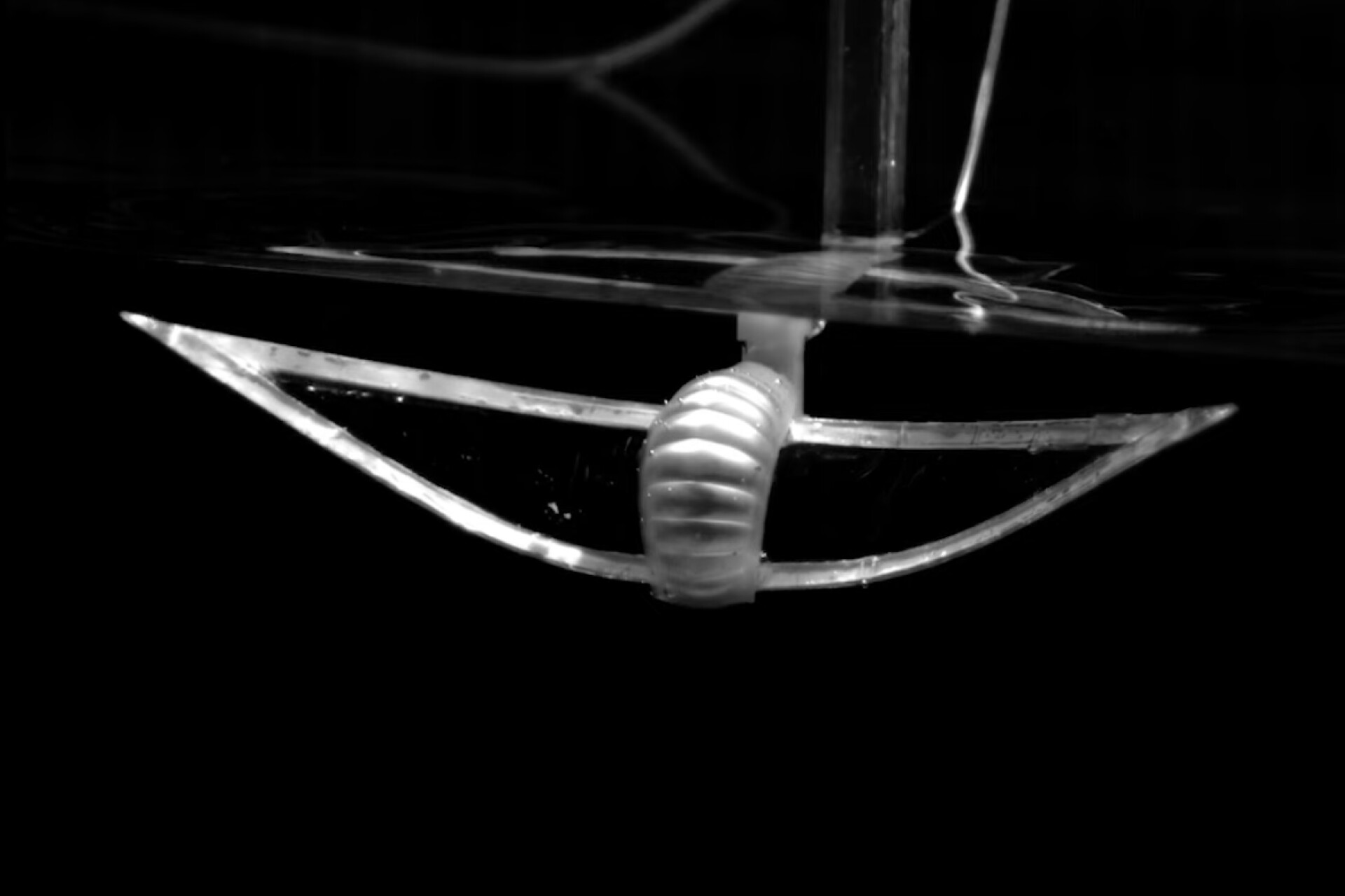
Uma vista lateral do novo e veloz robot raia-manta a nadar à superfície. Haitao Qing, Universidade Estadual da Carolina do Norte
Há apenas dois anos, uma minúscula raia-manta robótica estabeleceu o recorde de robô de corpo mole que nadava mais depressa. Agora, o seu sucessor atualizado bateu esse recorde, gastando menos energia no processo.
O robô original, com 22,8 mm de comprimento, foi desenvolvido pelo Prof. Jie Yin e pela sua equipa da Universidade Estatal da Carolina do Norte. Apresentava duas asas flexíveis de poliéster semelhantes às de uma raia manta, formadas por uma única estrutura curva biestável. A biestabilidade permite que uma estrutura mantenha duas posições estáveis sem necessitar de energia – como um gancho de cabelo que se desloca entre os estados aberto e fechado.
Mecanismo de acionamento inovador permite bater recordes de velocidade de natação
A estrutura biestável da asa do robô era ladeada por actuadores pneumáticos de silicone macio. Quando o atuador superior se insuflava, dobrava-se para cima, puxando a estrutura das asas para as encaixar para baixo. Esvaziar o atuador superior e insuflar o inferior inverteu este movimento, fazendo com que as asas se partissem para cima. Esta atuação alternada permitiu que o robô nadasse a uma velocidade impressionante de 3,74 comprimentos de corpo por segundo, cerca de quatro vezes mais rápido do que qualquer outro robô nadador de corpo mole anterior.
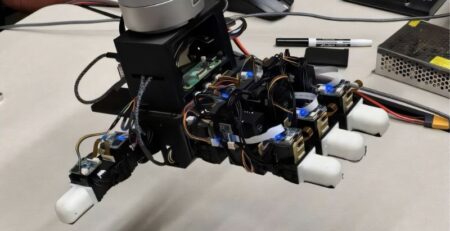
O novo design de 68 mm de comprimento simplifica e melhora este sistema. A equipa de Yin eliminou a estrutura biestável e o atuador inferior, substituindo-os por um design de asa monoestável. As asas ficam agora numa posição curvada para baixo quando estão em repouso. Um único atuador pneumático superior insufla as asas para baixo e conta com a força de restauração elástica da estrutura para as puxar de volta para cima quando esvaziadas.

O robô original, que imitava tanto a arraia-manta como a braçada de borboleta humana. Universidade Estatal da Carolina do Norte
Eficiência Melhorada: O Design Simplificado Duplica a Velocidade e Reduz a Utilização de Energia
O robô original, que imitava tanto a arraia-manta como a braçada de borboleta humana. Universidade Estatal da Carolina do Norte
Este mecanismo simplificado reduz o consumo de energia, uma vez que apenas é necessário um atuador por ciclo de batimento de asas. Como resultado, o novo robô atinge uma velocidade média de natação de 6,8 comprimentos de corpo por segundo – quase o dobro da velocidade original – enquanto utiliza 1,6 vezes menos energia.
Além disso, o design atualizado permite o movimento vertical, variando a velocidade de natação. Quando bate as asas lentamente, o robô passa mais tempo com as barbatanas em repouso, reduzindo a flutuabilidade à medida que a câmara de ar se esvazia. Se bater mais depressa, mantém a câmara de ar cheia durante mais tempo, aumentando a flutuabilidade.
De acordo com o estudante de doutoramento Haitao Qing, o principal autor do estudo, esta caraterística pode ter aplicações práticas. A equipa está agora a desenvolver um mecanismo de direção, prevendo utilizações futuras como a exploração dos oceanos e a observação da vida selvagem aquática.
O aumento da eficiência e da versatilidade do robô representa um avanço significativo no domínio da robótica flexível, como se pode ver no vídeo de demonstração abaixo.
Leia o Artigo Original: New Atlas
Leia mais: Um Visitante Interestelar Pode Ter Moldado as Órbitas do Nosso Sistema Solar