Engenheiros estão a Criar um Robô Voador Movido a Jato para Resposta a Catástrofes

Istituto Italiano di Tecnologia
Imagine que está ferido num trilho de montanha remoto e que contactou os serviços de emergência. Se a investigação italiana for bem sucedida, um pequeno robô humanoide com um jetpack poderá ser o primeiro a chegar até si.
Este projeto, desenvolvido pelo grupo de Inteligência Artificial e Mecânica do Instituto Italiano de Tecnologia, tem como objetivo fazer voar o iCub, um bípede de tamanho infantil originalmente concebido para investigação em IA, utilizando propulsão a jato.
Melhorias na conceção de humanóides com propulsão a jato
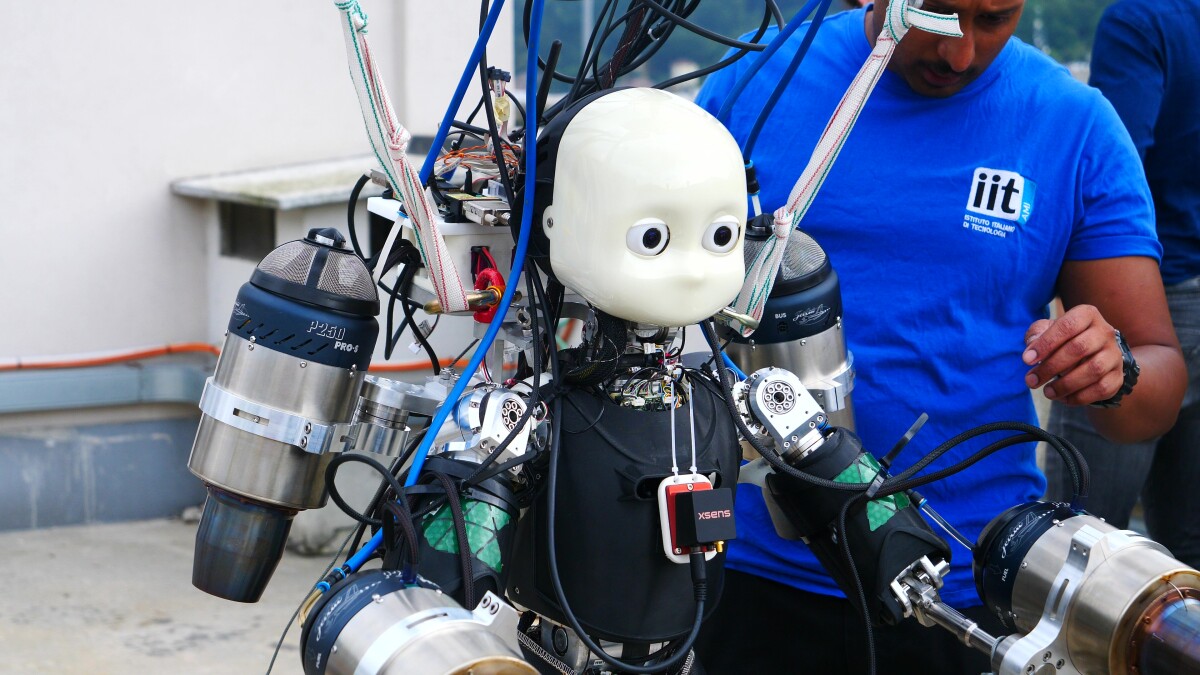
Para além de colocar uma mochila a jato dupla nas costas do robô, a equipa substituiu as mãos originais flexíveis e semelhantes às humanas por motores a jato adicionais, conhecidos como JetCats. De acordo com os investigadores, estes motores podem produzir um impulso máximo de 1.000 N (aproximadamente 225 lbf) e atingir temperaturas de escape até 800 °C (1.472 °F).
Actualizações para resistência e durabilidade
O iRonCub3, inspirado em Tony Stark, foi atualizado com uma nova coluna vertebral de titânio para suportar as forças que irá encontrar e apresenta agora coberturas resistentes ao calor em vez do elegante fato exterior utilizado num protótipo anterior.
A equipa também concebeu novos componentes electrónicos, instalou sensores de força-torque no jetpack e removeu alguns componentes para acomodar o sistema atualizado.
Como se pode ver no vídeo acima, o projeto ainda está na fase inicial de desenvolvimento. No entanto, a equipa já testou o humanoide movido a jato num túnel de vento para verificar as simulações aerodinâmicas. Embora os jactos tenham sido activados várias vezes, o iRonCub3 ainda não levantou voo. Apesar disso, a equipa está confiante de que em breve conseguirá pairar.
Além disso, foram desenvolvidos e testados algoritmos de controlo de voo e foi validado um planeador de trajectórias através de simulações. A equipa está agora a trabalhar na estimativa da posição e orientação do robô no espaço, utilizando dados da sua unidade de medição inercial e de uma câmara de profundidade RealSense montada no peito.
Instituto Italiano di Tecnologia
Desafios únicos na robótica movida a jato
“A complexidade desta investigação é bastante diferente dos desafios típicos da robótica humanoide”, referiram os investigadores. A termodinâmica é crucial porque o gás de escape da turbina atinge cerca de 800 graus Celsius e quase a velocidade do som.
A aerodinâmica dos sistemas multicorpos exige que as redes neuronais com componentes informados pela física sejam avaliadas em tempo real. As definições dos controladores devem integrar actuadores de alta e baixa largura de banda, tanto para as juntas como para as turbinas, e os planeadores devem gerar trajectórias não só para os motores mas também para as turbinas. A validação experimental é simultaneamente séria e perigosa, deixando pouca margem para erros.
O objetivo final é desenvolver robôs humanóides capazes de voar para locais de catástrofe ou de emergência para efetuar inspecções aéreas ou fornecer dados cruciais a equipas remotas. Estes robôs também seriam capazes de aterrar, andar, navegar por obstáculos, subir escadas, abrir portas e muito mais. Estas capacidades seriam úteis para salvamentos em fase inicial e para inspecionar edifícios ou infra-estruturas perigosas.
Leia o Artigo Original: New atlas
Leia mais: Veja: Robô Doméstico Humanoide Realiza uma Variedade Notável de Tarefas Domésticas